Exploring Autonomous Driving Through Mixed Reality
AI Cybersecurity Software for threat detection
AI Cybersecurity Software for threat detection
Industry
Industry
Industry
Mixed-reality, Autonomous driving
Mixed-reality, Autonomous driving
Mixed-reality, Autonomous driving
Responsibilities
Responsibilities
Responsibilities
As the Product Owner, I collaborated closely with the autonomous driving team to gather data and explore potential solutions. Based on various application scenarios, I proposed tailored development plans.
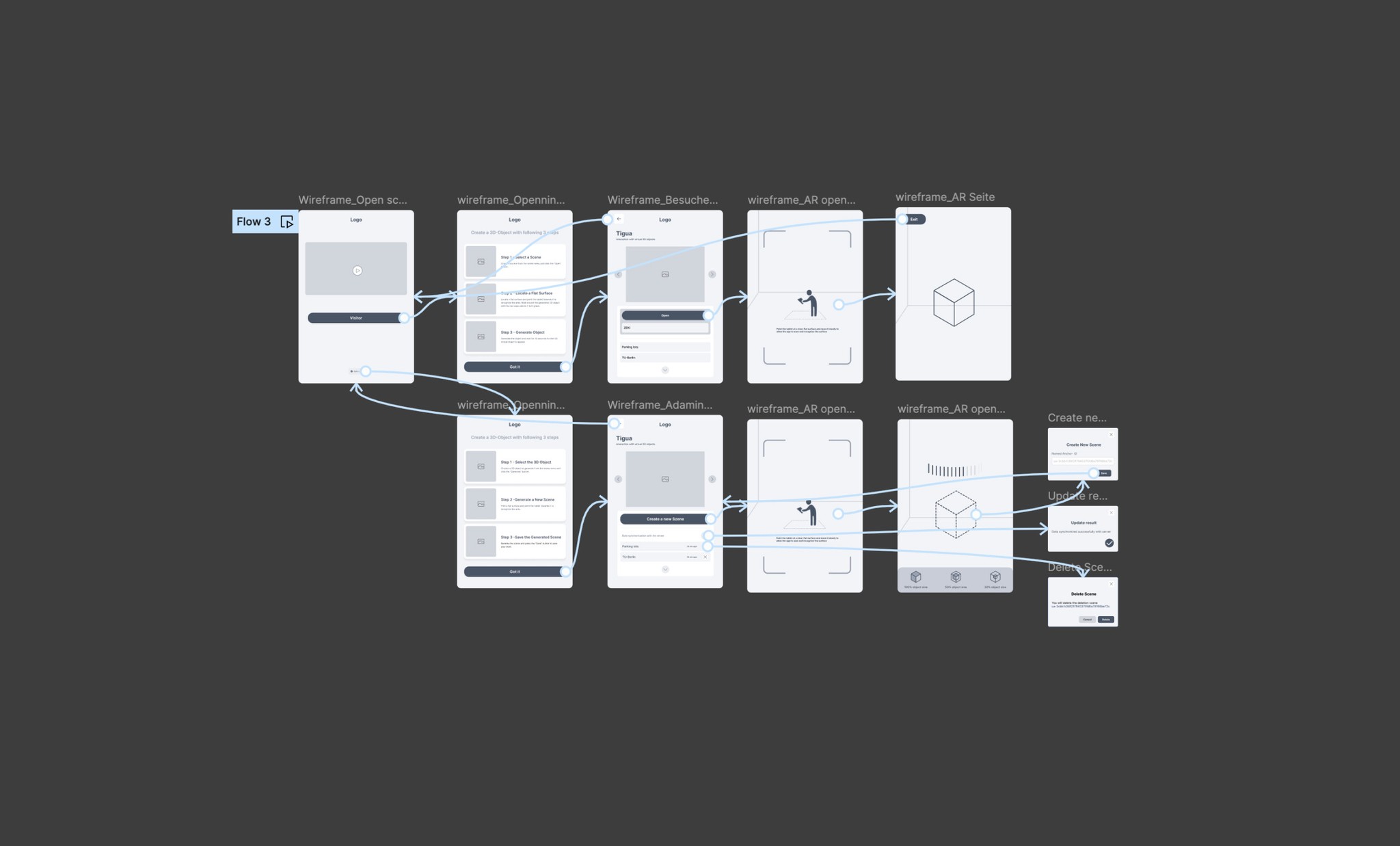
I also worked with colleagues from the virtual reality technology department to discuss technical implementation, designed user flows and interactions, created the UI, and conducted user testing to refine the experience.
As the Product Owner, I collaborated closely with the autonomous driving team to gather data and explore potential solutions. Based on various application scenarios, I proposed tailored development plans.
I also worked with colleagues from the virtual reality technology department to discuss technical implementation, designed user flows and interactions, created the UI, and conducted user testing to refine the experience.
As the Product Owner, I collaborated closely with the autonomous driving team to gather data and explore potential solutions. Based on various application scenarios, I proposed tailored development plans.
I also worked with colleagues from the virtual reality technology department to discuss technical implementation, designed user flows and interactions, created the UI, and conducted user testing to refine the experience.
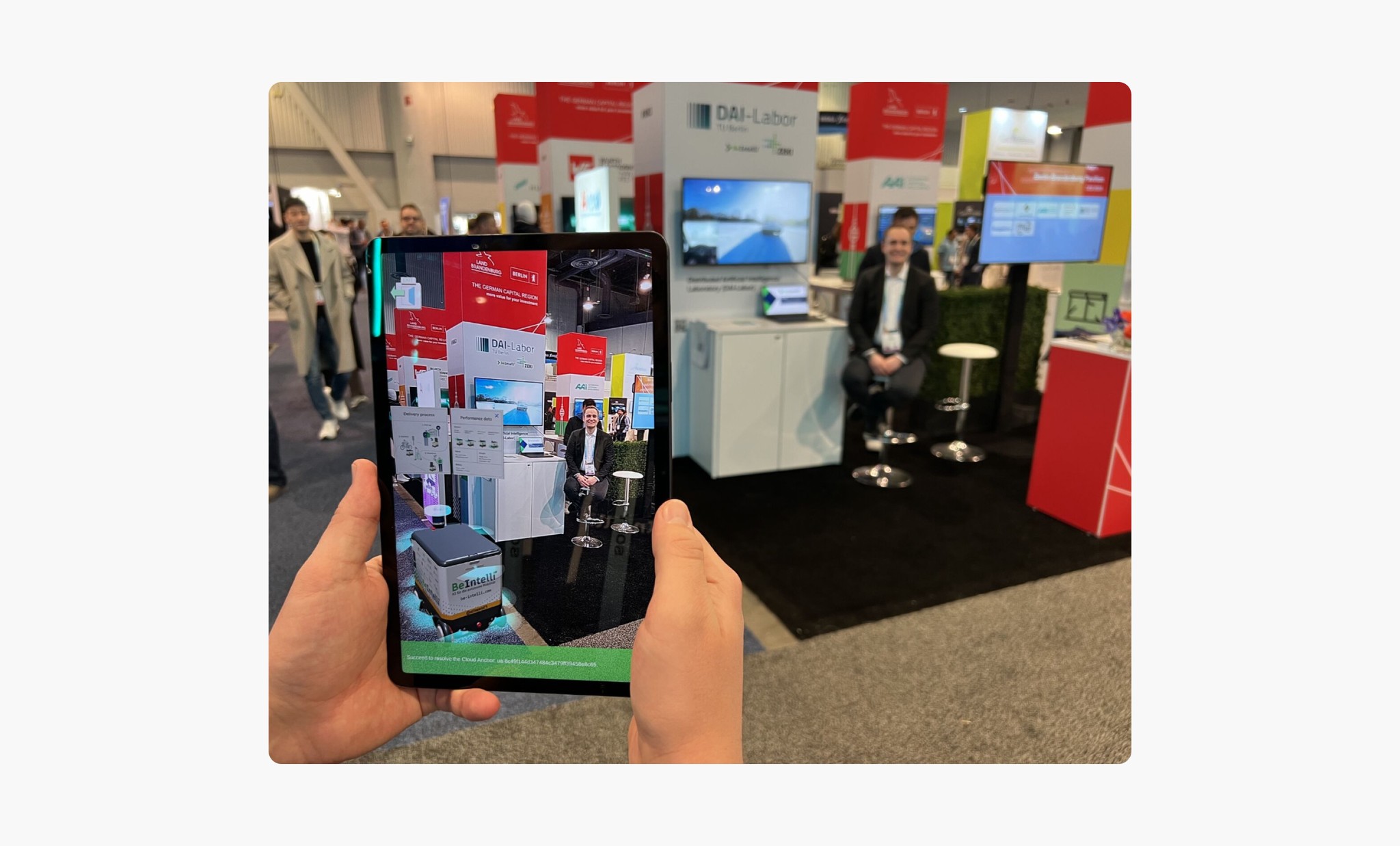
Beintelli AR is a mixed-reality tool developed to support the BeIntelli autonomous driving project. It enables visitors to interact with and gain a deeper understanding of the technology and sensors used by the BeIntelli team in the development of autonomous driving systems.
Beintelli AR is a mixed-reality tool developed to support the BeIntelli autonomous driving project. It enables visitors to interact with and gain a deeper understanding of the technology and sensors used by the BeIntelli team in the development of autonomous driving systems.
Beintelli AR is a mixed-reality tool developed to support the BeIntelli autonomous driving project. It enables visitors to interact with and gain a deeper understanding of the technology and sensors used by the BeIntelli team in the development of autonomous driving systems.
Problem
Problem
Problem
Understanding autonomous driving technology can be challenging for visitors without seeing the vehicles and robots in action. Additionally, the field is filled with complex technical terms, making traditional explanations feel abstract and difficult to grasp.
Understanding autonomous driving technology can be challenging for visitors without seeing the vehicles and robots in action. Additionally, the field is filled with complex technical terms, making traditional explanations feel abstract and difficult to grasp.
Understanding autonomous driving technology can be challenging for visitors without seeing the vehicles and robots in action. Additionally, the field is filled with complex technical terms, making traditional explanations feel abstract and difficult to grasp.
Approach
Approach
Approach
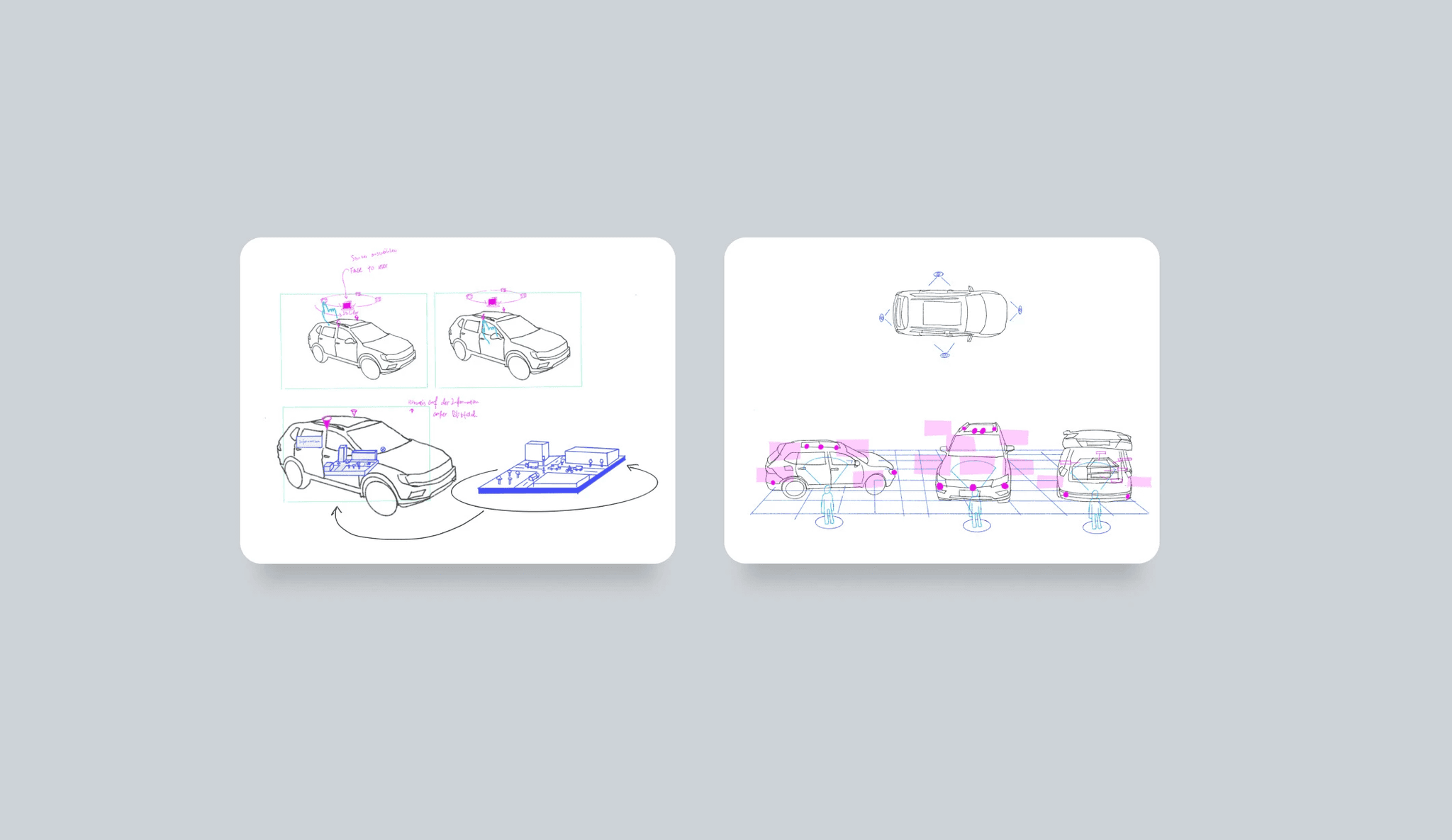
In situations where our autonomous vehicles and robots are not physically present, we developed a 1:1 3D model of the car and delivery robot. This model displays real-time 3D LiDAR point clouds in augmented reality (AR) and provides detailed sensor information, creating an immersive showcase of our technology.
When vehicles and robots are available on-site, we enhance interactive exploration by overlaying 3D virtual information onto the real cars and robots using geolocation, allowing visitors to engage with the technology in a more dynamic way.
In situations where our autonomous vehicles and robots are not physically present, we developed a 1:1 3D model of the car and delivery robot. This model displays real-time 3D LiDAR point clouds in augmented reality (AR) and provides detailed sensor information, creating an immersive showcase of our technology.
When vehicles and robots are available on-site, we enhance interactive exploration by overlaying 3D virtual information onto the real cars and robots using geolocation, allowing visitors to engage with the technology in a more dynamic way.
In situations where our autonomous vehicles and robots are not physically present, we developed a 1:1 3D model of the car and delivery robot. This model displays real-time 3D LiDAR point clouds in augmented reality (AR) and provides detailed sensor information, creating an immersive showcase of our technology.
When vehicles and robots are available on-site, we enhance interactive exploration by overlaying 3D virtual information onto the real cars and robots using geolocation, allowing visitors to engage with the technology in a more dynamic way.
Challenges
Challenges
Challenges
The main challenge of this project was its technical implementation. As the Product Owner, I had to think boldly, explore technical possibilities, and repeatedly test designed interactions across various application scenarios to ensure a seamless and effective experience.
The main challenge of this project was its technical implementation. As the Product Owner, I had to think boldly, explore technical possibilities, and repeatedly test designed interactions across various application scenarios to ensure a seamless and effective experience.
The main challenge of this project was its technical implementation. As the Product Owner, I had to think boldly, explore technical possibilities, and repeatedly test designed interactions across various application scenarios to ensure a seamless and effective experience.